Roboter machen jede Arbeit zu einem Kinderspiel
Machen auch Sie sich Ihre Arbeit durch autonome Systeme leichter

- Startseite
- Produkte
Die führungslosen Kletterroboter können für unterschiedliche Schweißprozesse angewendet werden und arbeiten mit moderne Automatisierungstechnologie und fortschrittlichen optischen Lasern, damit auch vertikal, auf gekrümmten und unregelmäßigen Oberflächen geschweißt werden kann, z.B. in der Öl-, Gas-, Chemie-, Atom- und Energieindustrie, im Schiffbau, im Schienenverkehr etc.
-
- Führungslose Schweißroboter, Kletterroboter für Schweißarbeiten Heutzutage sind Kletterroboter für mobiles schweißen die neueste Technologie für automatisches erkennen von Schweißnähten ohne Führungsschienen. Diese Systeme nutzen KI, Algorhythmen, Schweißautomatisierung, Lasererkennung, Sensorsteuerung und adaptive Technologie.
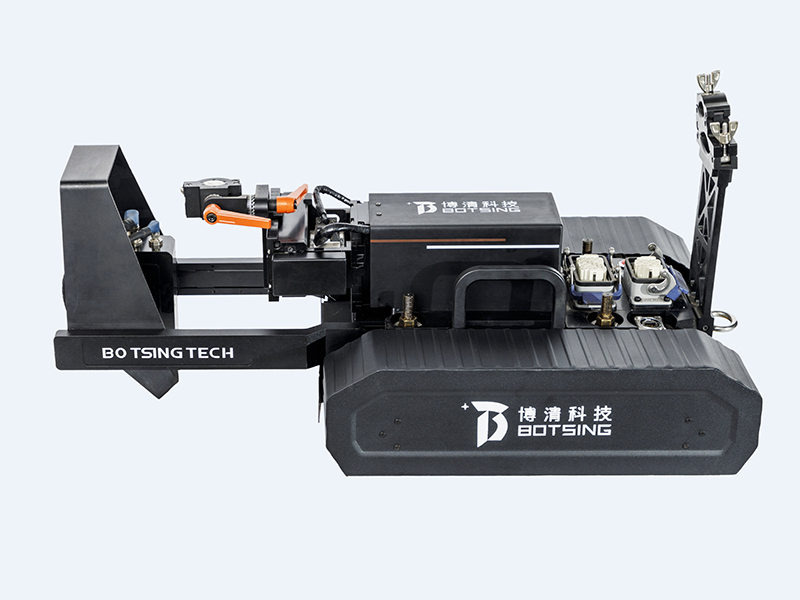
Diese Schweißroboter der neuen Generation arbeiten mit allem Schweißpositionen zwischen 1 und 6G und können sich 360° um ihre eigne Achse drehen. Sie werden über Raupenketten fortbewegt, wiegen nur 28Kg und können bis zu 60Kg Last tragen. Außerdem nutzen die Roboter einen Klettermechanismus, Lasererkennung und über 100 Algorhythmen. Sie können sich automatisch und schnell auf Veränderungen einstellen und sind die ersten Schweißroboter dieser Art, die ohne Führungsschienen und Programmierungen arbeiten. Dabei erreichen sie eine Genauigkeit von ± 0.2mm.BOT-WTP27-121 und sind daher perfekt zum Rohrschweißen geeignet (für Rohrdurchmesser zwischen 168mm und 1800mm). Die Schweißroboter bestehen aus einem Unterbau mit Gleiskette, einem Schaltschrank, einem optischem Sensorsystem ohne Führungsschiene, automatischer Schweißnahterkennung und Schweißlast. Dank effizienter optischer Sensoren können Schweißnahtinformationen (Breite, Fase, Armausladung) in Echtzeit mit ± 0.2mm Präzision Wiedergegeben werden.
-
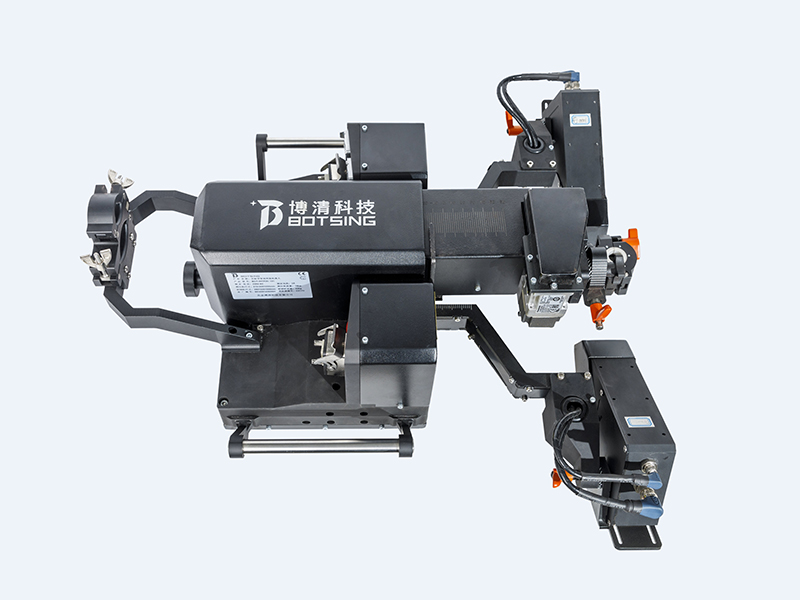
- Orbitalschweißroboter, führungslos Der Schweißroboter BOT-WTP27-121 eignet sich besonders zum automatiaierten Rohrschweißen und kann für Rohre mit Durchmessern zwischen 168mm und 1800mm verwendet werden. Dieser Schweißroboter bewegt sich auf Raupenketten, hat einen Schaltkasten, optische Lasersensoren und eine Ladefläche und benötigt keine Führungsschienen. Dank der optischen Laser werden die Schweißnähte in Echtzeit auf Breite, Tiefe und Schweißwinkel geprüft. So erreichen die Schweißroboter eine Genauigkeit von ± 0.2mm.
Heutzutage werden häufig Großbauteile noch per Hand oder haltautomatischer Schweißgeräte verschweißt. Diese Prozesse gehen oft mit vielen versteckten Kosten einher. Professionelle Schweißer unterlaufen langen, kostspieligen Ausbildungen um qualitativ hochwertige Schweißarbeiten durchführen zu können. Fehler sind jederzeit möglich und können die Produktionszeit verlängern und Kosten steigern. Außerdem sind Schweißarbeiten extrem ungesund und können gefährlich sein, da Schweißer ständig Blitzen, Funken, Rauch und Hitze ausgesetzt werden. Halbautomatische Schweißvorgänge an Großbauteilen sind nur durch Führungsschienen möglich, was Schweißarbeiten an gekrümmten und unregelmäßigen Flächen extrem umständlich macht. Die führungslosen Kletterroboter hingegen bieten hier die optimale Alternative zu den herkömmlichen Schweißvorgängen an. Daher eignen sich die Kletterroboter perfekt für Schweißarbeiten an Großbauteilen in der Bauindustrie und garantieren höchste Qualität und Effizienz.
 Inkonsistente Qualität der Schweißnähte
Inkonsistente Qualität der Schweißnähte Wenig Effizienz
Wenig Effizienz Höhere Arbeitskosten
Höhere Arbeitskosten Pneumokoniose (Staublunge)
Pneumokoniose (Staublunge) Sicherheitsrisiko
Sicherheitsrisiko Hohe Managementkosten
Hohe Managementkosten
 Führungsschienen werden benötigt
Führungsschienen werden benötigt Nicht möglich bei gekrümmten oder ungleichmäßigen Oberflächen (z.B. Rohre, Kugeltank etc.)
Nicht möglich bei gekrümmten oder ungleichmäßigen Oberflächen (z.B. Rohre, Kugeltank etc.)
Beijing Bo Tsing Tech Co., Ltd. wurde 2017 in Peking gegründet und ist ein national anerkanntes High-Tech-Unternehmen, dass sich auf Forschung, Entwicklung, Produktion und Vertrieb fortschrittlicher, intelligenter Schweißroboter spezialisiert hat. Unser Headquarter ist in Peking und wir haben zwei weitere Standorte in Anhui und Jiangsu (Anhui Bo Tsing Automation Tech Co., Ltd. ist das Forschungs- und Entwicklungszentrum; Jiangsu Bo Tsing Automation Tech Co., Ltd. ist ein Fabrikstandort, der sich über 3000m² erstreckt). Die Fabrik in Jiangsu arbeitet mit zwei Produktionslinien und erreicht eine Jahreskapazität von über 500 Schweißrobotern.
Anhui Bo Tsing Automation Tech Co., Ltd. (Anhui Bo Tsing Automation Tech)
JiangSu Bo Tsing Automation Tech Co.,Ltd. (Jiangsu Bo Tsing Automation Tech)